Update #20 - more resolver wiring debugging #
2021-08-15
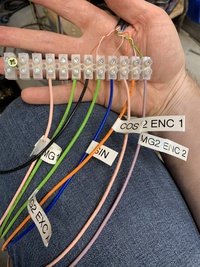
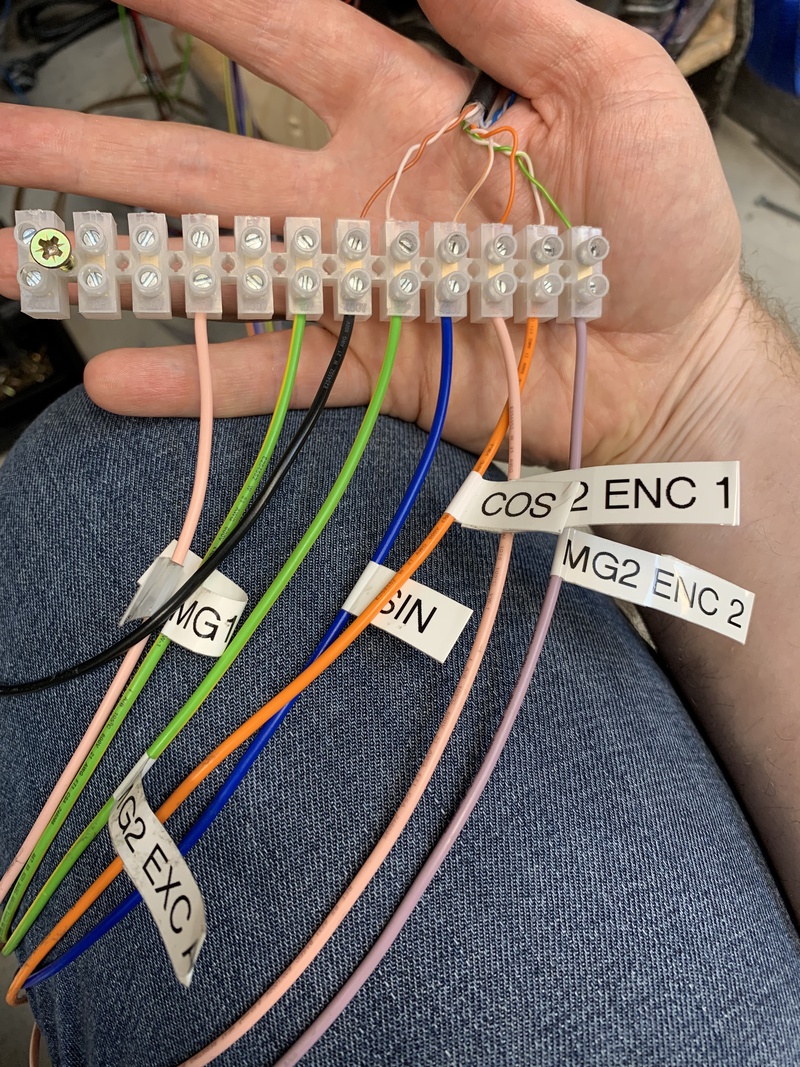
Still trying to figure out what the right polepairs/resolverpairs settings are for this motor. I went back to check each of the four possible resolver wiring combinations to verify the weird behavior I was seeing last time.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
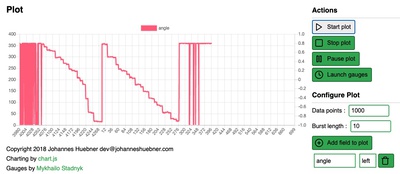
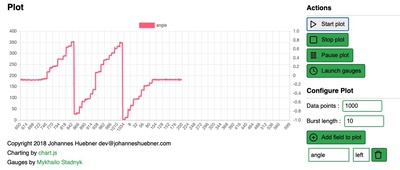
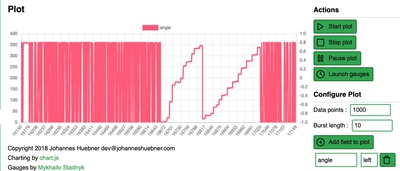
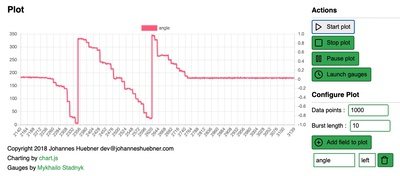
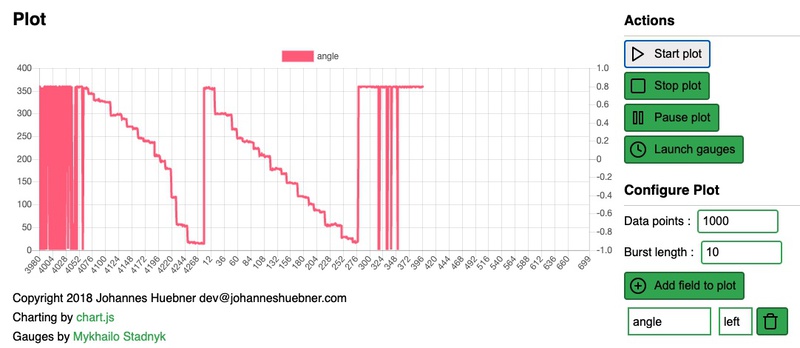
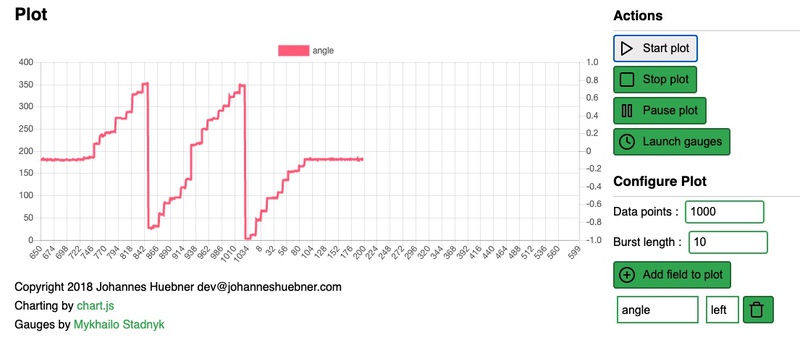
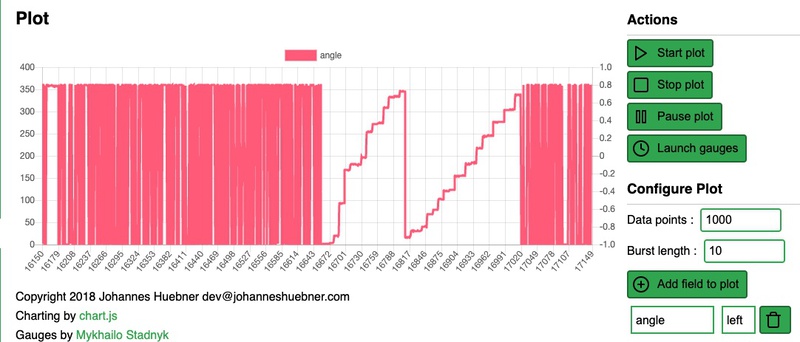
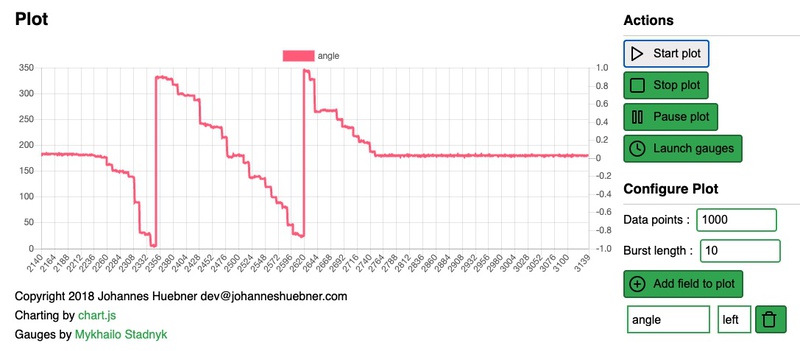
What I’m expecting to see is only one of the resolver wiring combinations to give me sensible angle readings. I.e., as I turn the motor the angle should increase steadily to 360, then immediately drop to zero, then resume climbing. The other three ‘wrong’ resolver wiring combinations should give me erratic angle readings. However, all four wiring combinations seem to be giving consistent output. For some of them the graph is reversed (the angle falls instead of rises), but the angle moves consistently from 0 to 360 or vice versa.
So, I can’t tell what resolver wiring is the correct one or if I’m doing something else wrong.